2000-11-20 高空大氣閃電影像儀(ISUAL)全球觀測區域軌跡動態模擬
- Details
- Created on Friday, 17 December 2010 10:18
高空大氣閃電影像儀(ISUAL)
全球觀測區域軌跡動態模擬
張名輝
成大高空大氣閃電影像儀科學團隊
國立成功大學物理系
在本文中﹐我們使用STK(Satellite Tools Kit, Analytical Graphics)電腦分析軟體,計算出福爾摩沙二號衛星上的科學酬載—高空大氣影像儀(ISUAL)的全球觀測區域動態模擬。
福爾摩沙二號衛星的軌道資料如下:
| Parameter | Mission Orbit |
| Duration | Remainder of 5 Years |
| Altitude | 891 Km |
| Inclination | 98.99 deg |
| Mean Motion | 14 rev/ day |
| Revisit Cycle/ Repeat Cycle | 1 day |
福爾摩沙二號衛星的科學任務目的有:
1. 獲得紅色精靈(Red Sprites)的全球分佈資料
2. 了解紅色精靈(Red Sprites)的動態演歷數據
3. 分析紅色精靈(Red Sprites)在紫外線波段的頻譜
4. 觀測大氣輝光及極光
1999/10/10 福爾摩沙二號衛星在中繼軌道(Parking Orbit)運行時ISUAL的觀測區域軌跡模擬
- Details
- Created on Monday, 13 December 2010 09:46
福爾摩沙二號衛星在中繼軌道(Parking Orbit)運行時高空大氣閃電影像儀的觀測區域軌跡模擬
-
張名輝,蘇漢宗
-
成大高空大氣閃電影像儀科學團隊
-
國立成功大學物理系
摘要
由於受到發射載具的限制,福爾摩沙二號衛星的任務軌道(高度891公里)無法由發射載具一次送達,必須先在較低的中繼軌道(Parking Orbit, 723km)上運行一段時間後,再藉由軌道轉換到達較高的任務軌道(Mission Orbit)。由於此二軌道的高度相差有168公里,且在任務時程規化上,福爾摩沙二號衛星亦會在中繼軌道上停留一段時間從事遙測及科學任務。因此,本文將會針對高空大氣閃電影像儀(ISUAL)在這個中繼軌道上的運作情形進行模擬,以了解ISUAL在這個中繼軌道上所需的觀測視角及觀測區域所涵蓋的範圍。
一、 電腦模擬的參數定義
由已知的文獻中及觀測數據可以得知﹐紅色精靈主要是發生大約高度50 ~ 90公里的高空中。為了滿足觀測上的需求﹐高空大氣影像儀必須要能觀測要40公里以上至150公里的空間﹐如此才可能觀測到紅色精靈的演歷資料。高空大氣閃電影像儀的視界(field of view)為6°×34°﹐且採用側視(limb view)的觀測方式﹐即科學儀器是架設在衛星的右側(如圖一所示)。由圖一中可以看出﹐在局部垂直局部水平(local vertical, local horizontal)的姿態下﹐衛星的局部座標系定義如下﹕局部座標系的Z軸(Lz)為指向地心的方向。Y軸(Ly)則為指向衛星軌道運動之角動量的反方向﹐即 Ly= -(rsat×vsat)∕(|rsat||vsat|) ﹐其中 rsat為衛星的位置向量﹐ vsat為衛星的速度向量。而X軸(Lx)則為指向衛星的前進方向。如前所述﹐高空大氣閃電影像儀是架在衛星的右側﹐即圖一中的Y-Z平面上。在此﹐我們定義影像儀和衛星本體座標Z軸的夾角為視角(viewing angle)。
圖一 、 ISUAL在福爾摩沙衛星二號的相對座標
由規格可知影像儀的視界(field of view)上下約為6度。為了滿足上文所述的觀測件條(觀測40 ~ 150公里的高空)﹐我們希望影像儀的視界上緣能切半徑為R+150km的圓,其中R為地球半徑,如圖二所示。圖二中,OA的長度為衛星的任務軌道高度(R+891 km),OP則為想要觀測的最高高度(R+150 km),所以利用正弦定理可以求出角OAP的大小約為63.9045度,此為影像儀的視界的上緣,所以影像儀的視界中心之視角約為60.9045度。但是衛星在中繼軌道上時,由於軌道的高度和任務軌道相差了168公里,所以針對任務軌道所算出的影像儀之觀測視角並不合適於中繼軌道上的操作。如圖二所示,線段OB代表衛星中繼軌道的高度(R+723 km),OQ則為想要觀測的最高高度(R+150 km),同樣地,利用正弦定理可以求出角OBQ的大小約為66.8252度,此為影像儀的視界的上緣,所以影像儀的視界中心之視角約為63.8252度。簡言之,衛星在中繼軌道上運作時,影像儀之觀測視角要比任務軌道時多3度。本文以下的部分就以影像儀在任務軌道之觀測視角加上3度來當作中繼軌道的觀測視角。
圖二、ISUAL的觀測視角
二、衛星在中繼軌道時運行軌跡在地面的投影
衛星在中繼軌道運行時,在地表所投影的軌跡如圖三所示:
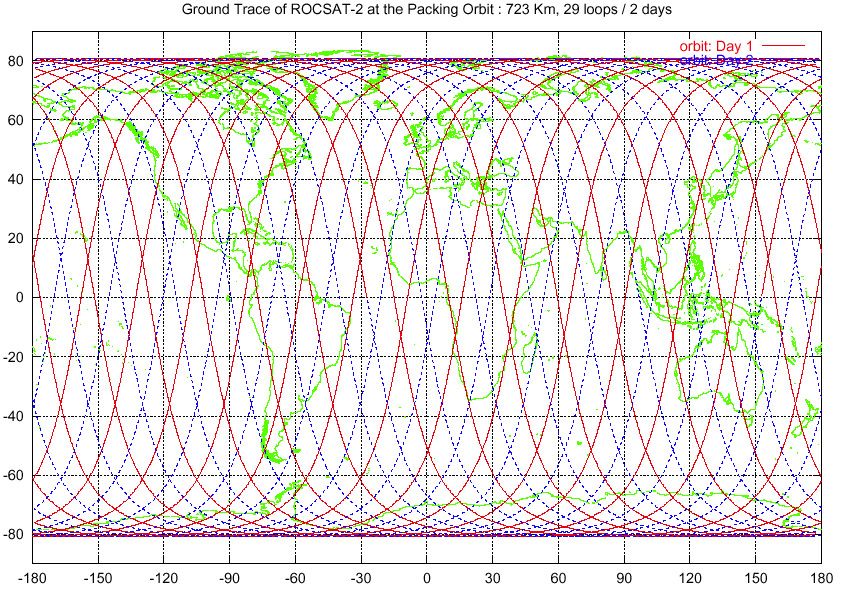
圖三、衛星在中繼軌道上所投影之地面軌跡(PDF格式)
由中繼軌道之相關參數可以得知,在此軌道上衛星一天繞行地球14.5圈。所以每兩天衛星的軌道就會重覆。這一點和任務軌道並不相同。在任務軌道上,衛星一天繞行地球14圈,所以每一天衛星所繞行的軌跡都是相同的。由圖三可以看出,在週期為兩天的運行軌跡中,兩天所繞行的軌跡彼此交錯,圖三中,紅色的線代表第一天衛星所繞行的軌跡,而藍色的線則代表第二天所繞行的軌跡。這種軌道設計可以減少衛星觀測上的死角,也就是說,在第一天中衛星繞行時所無法觀測到的區域,可以在第二天的繞行軌跡中看到,反之亦然。
三、影像儀的觀測視界(Field of View)在地表上的投影
由儀器的規格可知﹐影像儀的視界為6°×34°﹐影像儀中CCD的感測像素(pixel)為512×80。當衛星在軌道上運行時﹐任一瞬間﹐影像儀看到觀測區域(從40公里~150公里的高空)在地表上的投影﹐可以用圖四來加以說明。
圖四、影像儀的觀測區域在地表上的投影
假設影像儀架設的觀測中心線和垂直地心的垂直線夾角為﹐而我們所設定的觀測區域的邊界為40~150公里的高空。因此﹐我們以高度40公里(地球半徑加上40公里)的圓球來當作求取觀測區域的基準﹐並計算CCD中的每個像素(512×80個像素)的向量和基準圓球的交點。在這些像素所延伸出的向量中﹐我們可以分成三類(參考圖五)﹕第一類是和基準圓球沒有交點﹐也就是說﹐此一部分的像素是觀測到高於40公里的空間(圖五中角度為 q3 的線)。第二類是和基準圓球有二個交點﹐也就是說此一部分的感測像素可以觀測到地表至高度40公里的空間(圖五中角度為 q2 的線)。第三類是和基準圓球只有一個交點﹐這表示此一部分的像素會看到地面的影像﹐另一個交點會被地球擋住(圖五中角度為 q1 的線)。當觀測視角較小時﹐有一部分的地表影像會進入CCD中﹐因此﹐CCD的感測像素只能觀測到較接近衛星的一部分空間。當然﹐如果採用較大的觀測視角﹐使得影像儀視界的最下緣和衛星至地心垂直線的角度﹐大於衛星和地球間切線的夾角時﹐就不會有第三類的延伸向量產生。
在求得和基準圓的所有交點之後﹐將其投影到地表﹐並找出投影區域的邊緣﹐這個投影區可以稱之為觀測區域。換言之﹐在此一瞬間﹐衛星上的影像儀所觀測到的影像﹐是發生此一觀測區域之上空40~150公里間的大氣之中。
圖五、 CCD像素向量和基準圓的交點示意圖
四、高空大氣影像儀在全球觀測區域的涵蓋範圍
由於福爾摩沙衛星二號在中繼軌道上一天會繞地球14.5圈,兩天為一個週期,假設所採用的觀測視角為q = 63.9046°(為任務軌道的觀測視角再加上3度)。圖六中繪出衛星繞行之第一及第二圈時(兩圈),影像儀所涵蓋的觀測區域。由於ISUAL的觀測時間為夜間,因此,在此圖中,我們只繪出觀測區域中,當地時間在夜間七點至凌晨五點間的區域。
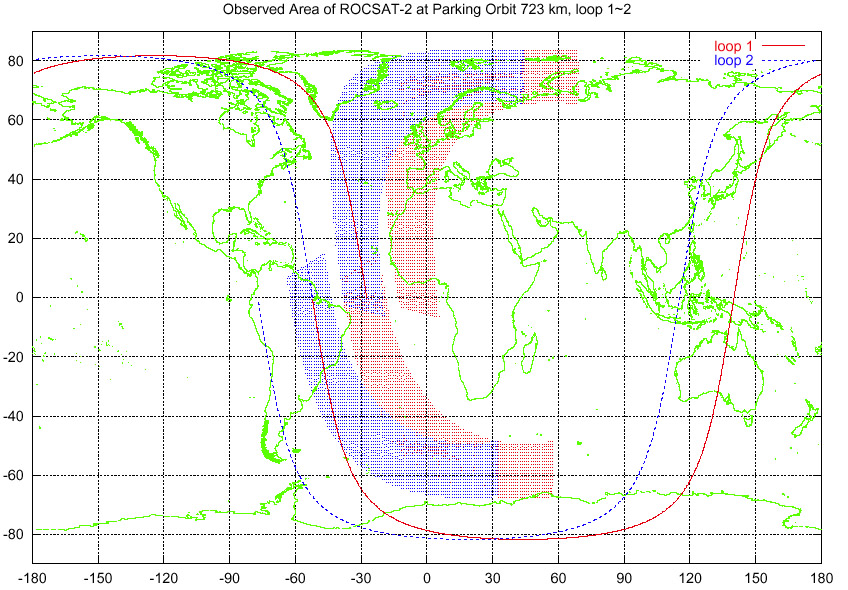
圖六、ISUAL在中繼軌道上所繞行之第一及第二圈之地面軌跡(PDF格式)
圖七為福爾摩沙衛星二號在中繼軌道上繞行地球第1~14圈,影像儀所涵蓋觀測區域中,當地時間為夜間之全球分佈。由此圖中可以清楚看出,紅色區域為ISUAL在這14圈的繞行軌道中的觀測區域,而白色區域則為觀測死角。除了接近南極附近的地區和低緯度的某些區域(白色區域)之外,大部分的區域皆為影像儀的觀測範圍所涵蓋。
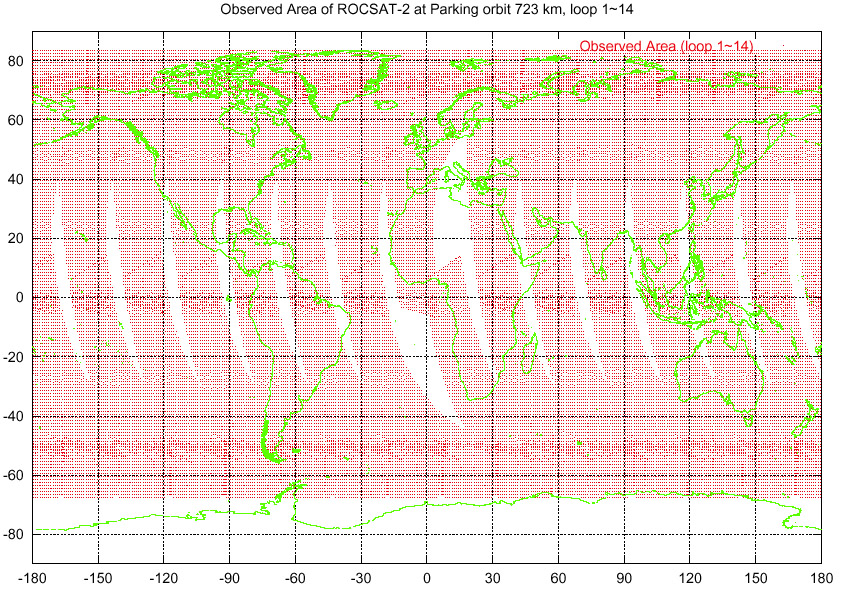
圖七、影像儀全球觀測區域的涵蓋範圍(第1~14圈)(PDF格式)
圖八為福爾摩沙衛星二號在中繼軌道上繞行地球第15~29圈,影像儀所涵蓋觀測區域中,當地時間為夜間之全球分佈,藍色區域為ISUAL的觀測區域,白色區域則為觀測死角。
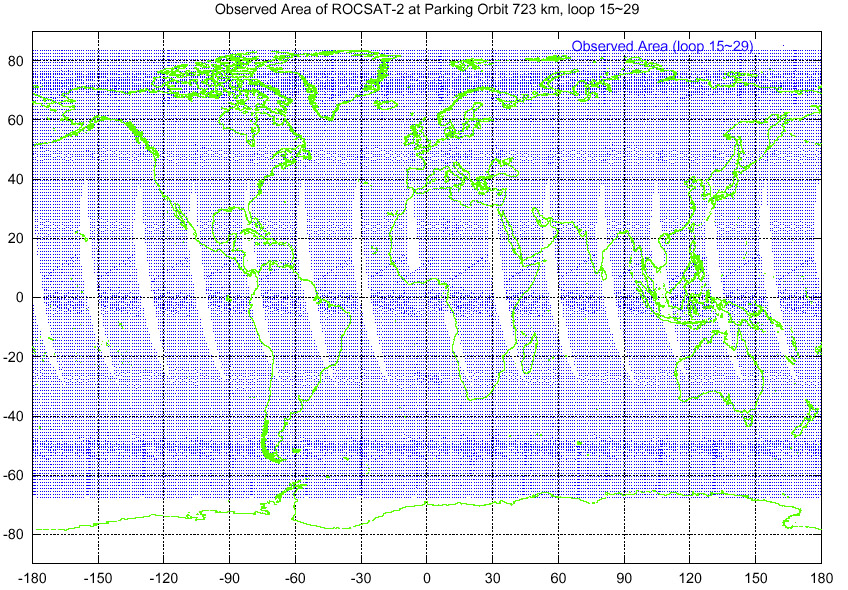
圖八、影像儀全球觀測區域的涵蓋範圍(第15~29圈)(PDF格式)
結合圖七和圖八我們可以得到ISUAL在中繼軌道上繞行一個週期(兩天共29圈),其觀測區域的涵蓋面積如圖九所示。由圖九可以明顯看出,在經過一個繞行週期之後(29圈),ISUAL的觀測區域除了南半球的高緯度區域之外,幾乎涵蓋全球。
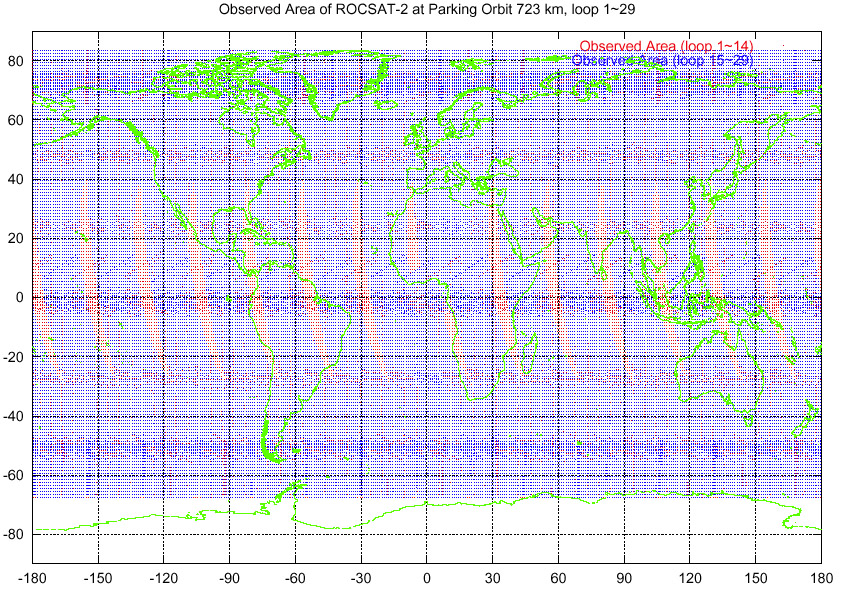
圖九、影像儀全球觀測區域的涵蓋範圍(第1~29圈/兩天)(PDF格式)
五、結語
由前面的分析可知,福爾摩沙二號衛星在中繼軌道運行時,ISUAL的觀測視角要比在任務軌道時多3度,才能夠得到和任務軌道運行時相近的觀測涵蓋區域。由於在中繼軌道上衛星一天繞行地球14.5圈,並以兩天共29圈為一個運作週期,在這一個運作週期中,雖然在衛星繞行地球的每一圈中,ISUAL的觀測區域會有死角產生(參考圖七和圖八中的白色區域),但結合兩天共29圈的運作週期所得的涵蓋區域則可幾乎覆蓋全球。
一但衛星脫離中繼軌道進入任務軌道後,ISUAL的觀測視角必須調整回原來的60.9045度,以免使的觀測視角太高而使得觀測區域的面積大幅降低。因此最在衛星本體上裝置一個伺服機構,用以調整ISUAL的視角,以使得在不同的操作軌道時皆可以得到最好的觀測範圍,並可以依據突發狀況做適度調整。
Sprite99地面觀測記行
- Details
- Created on Monday, 13 December 2010 09:14
Sprite99地面觀測記行
蘇漢宗、許瑞榮
成功大學 物理學系
FORMOSAT-2 高空大氣層閃電儀 成功大學科學團隊
摘要:
在國科會太空計畫室的支持下,成功大學物理系許瑞榮與蘇漢宗兩位老師,代表FORMOSAT-2高空大氣閃電儀團隊,前往美國亞利桑那州的基特峰 (Kitt Peak),參加為期一個月的Sprite99地面觀測。參與的目的在於取得第一手的sprite地面觀測經驗與數據,並對熟悉各種地面觀測儀器的優缺點。另外,也作為是否在台灣進行sprite地面觀測的先期研究。
這次的觀測任務,在觀測經驗的學習、儀器使用和儀器的評估方面,可以說是非常成功。但在觀測數據方面,由於這段期間亞利桑那州南部的天候不佳,基特峰觀測基地常下雨或籠罩在烏雲下,能夠觀測的天數不多,導致數據量並不多。但是Sprite99希望從兩個不同地點,對同一個sprite作同步觀測的任務目標,在這次任務已經達成。我們分別在七月二十七日、八月七日及八月十二日,取得兩地同步觀測的數據。尤其在八月七日,我們在理想的天候下,除了取得兩地同步觀測的數據,並利用望遠鏡頭記錄了sprite的細微結構。八月七日的數據,應能對sprite的研究有相當的幫助。
觀測地點與參與人員
因為sprite是雷雨雲和電離層間的放電現象之一,它通常由雲和地面間的閃電所觸發,所以sprite研究的地點是和閃電研究的理想地點相同。美國、亞利桑那州和新墨西哥州的南部,分別是Sonora沙漠和?沙漠的所在,在夏季的七-八月間,來自墨西灣熱而潮溼的空氣北移,和美國大陸冷而乾的空氣接觸,形成鋒面前緣。鋒面的氣流變得很不穩定,所造成的雷雨雲,常發生閃電和急劇的降雨。這段期間是亞利桑那州和新墨西哥州的Monsoon季節,雷雨交加而且大雨滂沱,是這一帶沙漠夏季的特殊天候。亞利桑那州南部的基特峰俯視Sonora沙漠,是Sprite99的觀測基地之一,另一個基地是新墨西州的Socorro。從這兩個基地可對由墨西哥灣上來的峰面作同步觀測,基特峰基地和Socorro基地間的距離大約是400公里,圖一為這兩個基地的大致位置圖。
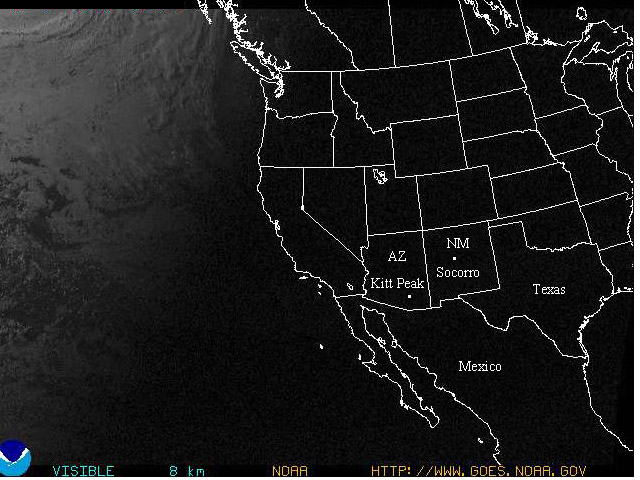
圖一、Sprite99的觀測基地:亞利桑那州 (Arizona, AZ) 的基特峰(Kitt Peak)及新墨西哥州 (New Mexico, NM) 的Socorro,兩者間的距離是400公里。
這兩個基地的觀測人員和參與觀測期間如下:
(1) 基特峰 (Kitt Peak, Arizona):
UCB : Steve Mende (08/09 – 08/13)
Lockheed : Rick Rairden (07/14 – 07/20)
成功大學:蘇漢宗、許瑞榮 (07/15 – 08/14)
Danish Meterological Institute : Torsten Neubert (08/09 – 08/17), Thomas Allin (07/16 – 08/17)
(2) Socorro, New Mexico:
Stanford University : Elizabeth Gerken, Timothy Chevalier (07/10 – 08/31)
在國科會太空計畫室的支持下,成功大學物理系許瑞榮與蘇漢宗兩位老師,代表FORMOSAT-2上大氣層閃電儀團隊,參加Sprite99為期一個月的地面觀測,我們參加的是Steve Mende博士(UCB)所負責的基特峰觀測地點。Sprite99的目標很單純,主要想要從兩個不同的觀測地點,對同一個sprite作觀測,並作出sprite發生位置的精確定位,再配合美國閃電偵測系統的數據,找出產生sprite的向下閃電。而從不同方向看同一個sprite,可能可以建構出sprite的立體形狀。
對成大高大氣閃電儀團隊來說,我們除了達成這次觀測的目標之外,更希望能過親身的體認地面觀測的困難和考量,以獲得實做經驗。雖然我們計畫從太空觀測sprite,但有第一手的地面觀測經驗,對本計畫來說,絕對有正面的幫助。除此之外,這次的觀測經驗,也可以看成是否在台灣作地面觀測的前期研究。
工作日誌
以下為我們這次觀測行的工作日記,以及我們的一些感想。
七月十五:(UT 197)
從高雄出發前往亞利桑那州的土桑市,中途連候機的時間都算進來,總共花了將近二十四個小時。雖然轉接的班機在洛杉磯誤點將近一個小時,不過Lockheed公司的Rick Raiden博士仍在機場等候,在找到住宿的旅館並用過晚餐後,就直奔80公里之外的基特峰美國國家光學天文台,作這次sprite觀測行的第一晚的觀測。不過基特峰陰雨不停,一直無法作觀測,我們等候到淩晨,看天氣仍然沒有轉好的傾向,再加上長途飛行非常疲憊,所以把儀器略作整理後,就開車下山回旅館過夜。位在Socorro的史丹佛大學隊,寫電子郵件來,提到他們在墨西哥北部,大約每五分鐘可以看到一個sprite事件。
為了使觀測資料方便和衛星、閃電和其他研究群的觀測作比較,觀測定時的標準採宇宙時(Universal Time, UT),計日採開年後的累積天數,所以七月十五日是本年的第217天。計時採取格林威治平均時,也就是用英國格林威治市的時間作為計時標準,亞利桑那州因為夏天採用日光節約時間,所以本地時間和加州地方相同,落後UT時七個小時。而台灣的時區超前UT時八個小時,所以台灣和亞利桑那州夏天的時差是十五個小時。由夜視照相機傳下來的影像,每一定格都先經過一部True Timer加印上宇宙時,再傳到錄影機的輸入端,由錄影機加以記錄。
七月十六 (UT198)
下午四點開車上山觀測,五點二十五分到達基特峰。Kitt Peak 和 Socorro 兩個觀測地點都有大量陰雲籠罩,而且偶而飄下陣雨。我們一直守候到淩晨一點多,見天氣沒有轉晴的跡象,只好放棄今晚的觀測任務,開車回土桑市。回到旅館已經是淩晨三點。
基特峰天文台的全名是Kitt Peak National Observatory (簡稱KNPO),基特峰為美國國家光學天文台的大本營,為了方便遠來的天文研究人員,山上備有宿舍供觀測人員短期居住,並對工作人員及觀測人員提供餐飲服務,不過KNPO今年因為舉辦暑期高中科學教師營隊,在七月二十七日前宿舍並無空位,我們只好每天由土桑市來回開三個小時的車子,通勤上山參加觀測。所以我們第二天就租了一部小車,以方便上山觀測。經由太空計畫室劉代瑜小姐的介紹,在亞利桑那大學物理系任教的謝克強教授夫婦來旅館看我們,以及去超級市場採購日常用品。
七月十七日 (UT199)
基特峰及Socorro基地雲層厚重,視線不良無法進行觀測,約在晚上十一時半,宣告放棄本晚的觀測,淩晨一時,回至下榻的旅館。
雖然天候不適合觀測,但我們將全套設備架設起來,並把系統的操作練習幾次。系統的架構非常簡單(參見圖二),主件是兩架夜視攝影機和控制系統。每一套系統所用的鏡頭都是標準的照相機鏡頭,這對於更換成其他鏡頭應是很容易。每部攝影機的組成都是
鏡頭 -> 影像增強器 (image intensifier) -> 耦合鏡頭 或 光管 -> CCD or CID
CCD的影像是逐條輸出式(line-transfer)而CID(charge injection device) 是整面輸出 (plane-transfer)。兩者最大的差別在於強光源時的表現,CCD在輸出時會發生漏光,使強光源出現在數個定格上,而CID就沒有這種問題。不過CCD可作條式輸出式,在上「大氣層閃電儀」的應用上,可以做部份定格快速轉移,而CID就沒有這種自由度,所以「大氣層閃電儀酬載」的影像儀仍然將使用CCD科技。
七月十八日 (UT200)
基特峰的上空多雲,但並沒有下雨的可能,所以情況仍然允許觀測的進行。從晚間8:30起,對南方及東方共進行了五個小時的觀測,並沒有看到任何sprite。淩晨1:30決定結束今晚的觀測,開車下山並在3:00回到土桑市的旅館,沿途上看見刺蝟、土狼、野鼠、野免、臭鼬等沙漠野生動物。
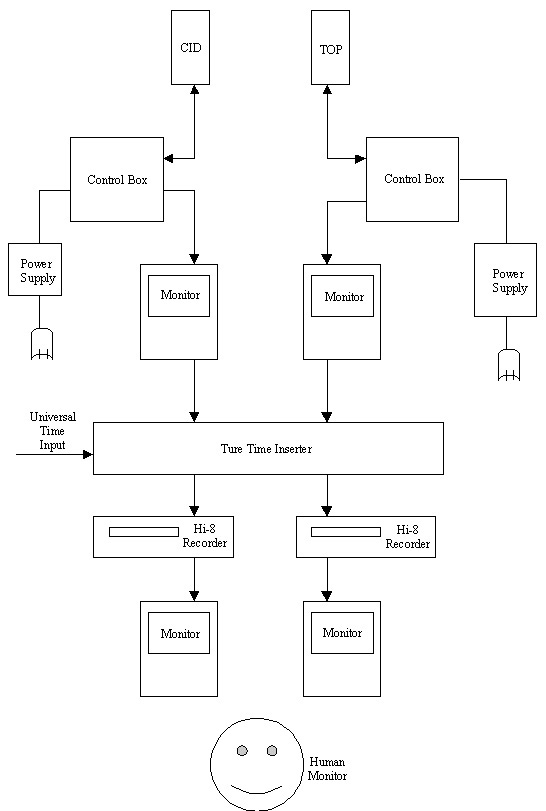
圖二、攝影系統的各項儀器配置圖,TOP相機是採用CCD科技,而CID相機是用Charge Injection Device (CID)科技,除此之外,兩部攝影機的外部配備完全相同。
七月十九日 (UT201, 1 sprite)
晚間8:30開始觀測,照相機的視野約是20°x 15°。由於在西南方一直有很頻繁的對地閃電,所以我們決定對這個方向做觀測,並在晚間10:19記錄到本次觀測行的第一個sprite。但在接下來的二個半小時,並沒有再看到其他的sprite,有點失望。淩晨一時結束本晚的觀測,淩晨三時回到旅館。
Sprite觀測視野及宇宙時:(123az, 9.5; 201: 05:19:48)
觀測視野是指觀測視窗的中心,這裡是以北方為方位標準,例如正北方是0az (azimuth),東方是90az而南方是180az,所以123az是東方偏南33度。9.5是地平面上方9.5度。觀測視野的確認,是來自天文軟體的星野和攝影機視野裡的星野的比較。我們所使用的天文軟體是Sienna軟體公司所出版的Starry Night (http://www.siennasoft.com/),除了它的精確度不錯之外,軟體所顯視的星野和實際所看到的很相
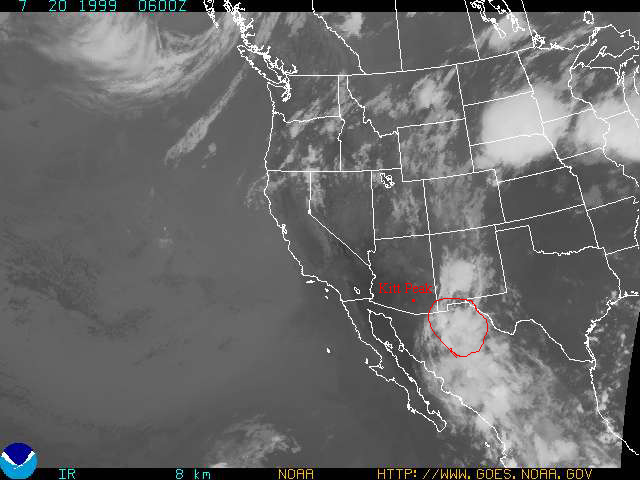
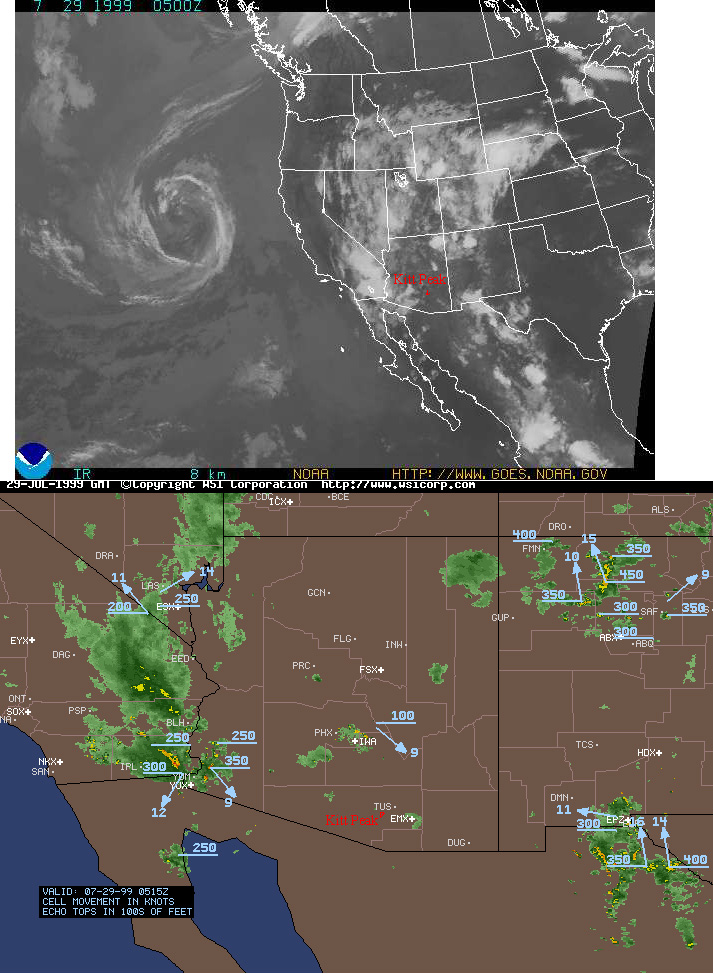
圖三、用以選定sprite觀測雷雨系統的雲圖,這張是七月十九日晚上十一時(宇宙時七月二十日淩晨六時)的雲圖,紅色標框的地區即是我們所觀測的雷雨系統。近,非常容易定出很精確的視野。觀測目標 (雷雨系統)的選取,主要的根據是雲圖(參見圖三)。通常是以雲層最濃密的地方為觀測目標,雲圖每小時更新一次,而觀測的標的也隨著雷雲系統的移動而調整。
在觀測中,可以很清楚地見識到CCD在輸出時會發生漏光的問題。CCD相機遇到很強的對地閃電時,經常在垂直方向一整排都過被強光蓋過,很難看出在閃電上方是否有伴隨的sprite。
七月二十日 (UT202, 4 sprites)
下午四點由土桑市開車上基特峰,路上恰好遇到一個小型的雷雨系統。在車內看到閃電不停地打在道路的兩邊,感受非常的特殊。
為了避開CCD在條列方向漏光的問題,所以把兩架照相機都旋轉90度,所以相機的視野變成 15°x 20°。在南南東方向觀測兩小時並看見兩個sprite,後來轉到東方觀測,又看見兩個sprite。晚間11:30後,天空雲層密佈一直不見轉好,淩晨1時結束觀測,檢視整晚的錄影,2:30回到旅館。
Sprite觀測視野及宇宙時:(152az,9.5; 04:14:05,04:22:39), (101az, 8; 05:01:22,04:22:39)
上午參觀Saguaro National Park - Rincon Mountain District,並沿Cactus Drive開車繞了一圈,Rincon Mountain District對Sonora沙漠的植物有很完整的保存和介紹,對大仙人掌 (saguaro cactus) 的印象尤其深刻。 (http://www.saguaro.national-park.com/)
七月二十一日 (UT203)
Rick Raiden博士結束觀測,返回加州的Lockheed/Martin公司。基特峰整晚都在雲層下,無法觀測。
七月二十二日 (UT204)
基特峰整晚都在雲層下,無法觀測。
下午參觀 Arizona-Sonora Desert Museum,這是一個世界級的沙漠動物園和生態園,值得一遊。 (http://www.desertmuseum.org/index.html)
七月二十三日 (UT205)
基特峰整晚都在雲層下,無法觀測。
七月二十四日 (UT206)
基特峰整晚都在雲層下,無法觀測。
七月二十五日 (UT207)
基特峰整晚都在雲層下,無法觀測。數天來天候一直不見改善,很令人沮喪。
七月二十六日 (UT208, 13 sprites)
基特峰一直到晚間11:00,在南方才有部份雲隙出現,11:30起在南方一連觀測到13個sprite,而且Socorro基地也在同一方向看到二十多個sprite,下列打星號的事件為兩個基地有同步觀測的 6個sprite,基特峰基地淩晨後雲層又復合,失去唯一的觀測視窗。大部份觀測到的sprite多在雲層後面,結構無法明確辦認,對決定sprite的立體結構幫助不大,而由雲層所反射的滿月月光,更降低了sprite的對比。
Sprite觀測視野及宇宙時:(166az, 8.5; 6:38:56, 6:41:15, 6:42:31, 6:47:21/23, 6:48:38, 6:49:43 *, 6:50:37 *, 6:51:39, 6:53:28 *, 6:55:46 *, 6:57:28 *, 7:00:19 *, 7:16:31)
打星號的事件,為已經確認基特峰和Socorro基地有同步觀測的sprite事件。
早上參觀 Coolidge市的Casa Grande Ruins National Monument,對亞利桑那州的在十四世紀前的印地安人遺跡,有了粗略的了解。(http://www.nps.gov/cagr/index.htm)
七月二十七日 (UT209)
基特峰整晚雷雨交加,無法觀測。
搬到基特峰頂的美國國家光學天文台宿舍住,從此不需要在淩晨開車下山。閃電擊中我們觀測建築物,擊毀網路路由器 (reuter),很幸運地我們的個人電腦並沒有受損。
淩晨從基特峰開車下山,最大的困難不在於和土桑市有80公里的路程,而是在距山頂3公里內,不能開大燈的規定。這項規定的用意在於降低車燈對可見光天文觀測的干擾,但對我們來說在路途生疏下,只能用小燈開車下陡峭的山路,用驚險萬狀來形容,實在也很貼切。
七月二十八日 (UT210)
陰雨及雲層在晚上九點後慢慢散去,10:30開始觀測。先後觀測東北、東南及東方,都沒觀測到sprite。從美國國家閃電偵測網(National Lightning Detection Network, NLDN) 的數據來看,今晚的閃電活動非常低。Socorro基地的人員,也沒有看到任何sprite。
觀測目標的選取,通常是根據雲圖,但雲層的厚薄,通常不一定和雷雨系統的活躍程度有絕對的關聯性。我們在網路找到一份降雨量圖,因為降雨量大的區域,通常雷雨活動也較頻繁(如圖四)。所以觀測目標的選取,也可以參考降雨圖,而雲圖與降雨圖兩者都是我們選定觀測目標的重要參考。
七月二十九日 (UT211)
基特峰下午陰雨,很幸運的晚上雨停了。晚上八時開始觀測,試東北、東南及東北方,除了看到許多流星外,並沒有觀測到sprite,淩晨1:30分結束本晚觀測。
七月三十日 (UT212)
絕佳的觀測天氣,不過大部份的雷雨活動都離基特峰很遠。例如,東南方雷雨系統的距離是700公里,東北方雷雨系統的距離是1000公里。從晚間8:30開始觀測到凌晨1:00止,並未看見任何sprite。
七月三十一日 (UT213, 1 sprite)
晚間8:10開始觀測,水平方向的視線不佳,約在8點56分在東方看見一個sprite,接下來整晚都沒有再觀測到其他的事件。
Sprite觀測視野及宇宙時:(86az, 9; 3:55:58)
圖四、七月二十八日晚上10時左右的雲圖(上圖)和降雨圖(下圖)。降雨量大的區域,通常雷雨也較活躍,也最活躍區的中心(黃色區或紅色區),通常是最有希望產生sprite的地區。
八月一日 (UT214)
晚上八時剛開始觀測時,天候非常良好,但到深夜,厚雲逐漸遮住水平面的視野,在東北、東及東南方都沒觀測到sprite,在凌晨1:00後,因雲層太厚而結束今晚的觀測。
八月二日 (UT215, 6 sprites)
基特峰的東部有數個很活躍的雷雨系統,不幸的是基特峰陰雨。初晚的雨約9點停止,不過觀測視野仍然大部份被烏雲遮住。試著對東南和東方作觀測,但受雲層的阻礙,一直沒看到sprite。到10:36後,東方的雲層有一個小裂隙,我們在一個半小時內,在這個方向看見六個sprite。但接下來的二小時,並沒有再觀測到其他sprite。烏雲又逐漸聚合,在凌晨兩點結束本晚的觀測。
Sprite觀測視野及宇宙時:(72az,15; 05:36:17, 05:42:29, 05:50:58, 06:06:19, 06:29:30, 07:01:59)
八月三日 (UT216)
天候良好,東方的雷雨系統也很活躍,但整晚的觀測都沒看見sprite。
八月四日 (UT217, 4 sprites)
大部份的時間,基特峰被雲層覆蓋,9:36左右,在東方有很小的觀測視窗,並在二十分鐘內看見4個sprite。
Sprite觀測視野及宇宙時:(87az,13.5; 4:36:17, 4:38:54, 4:41:09, 4:47:32)
八月五日 (UT218)
大部份的時間多在雷雨雲的籠罩下,並無所獲。
八月六日 (UT219)
天候絕佳,唯一的雷雨系統位在東南方距離我們600公里,觀測整晚並沒有看到sprite。
八月七日 UT220, 33 sprites)
本晚的數據量和數據品質,是這次觀測任務以來最好和最多的。我們位在基特峰和Socorro的觀測基地,同時觀測位在墨西哥的巨大雷雨系統。在晚間8:25起的七十分鐘內,我們觀測到33個sprite。其中有二十個事件,並且有使用望遠鏡頭拍攝的細部數據。本晚的數據的質和量,足以補償七月十五日以來的挫折感。

圖五、八月七日所記錄的第三十三個sprite。上面的定格來自CID相機,使用標準50mm/f1.4鏡頭。下面的定格來自TOP相機,配置300mm/f4.5鏡頭。
Sprite觀測視野及宇宙時:
(148az, 6, 151az, 7, 149az, 4; 3:25:04, 3:25:59, 3:28:34, 3:35:54, 3:40:27, 3:41:01, 3:43:43, 3:45:54, 3:46:47, 3:50:20, 3:52:38, 3:53:51 TL, 3:55:44 TL, 3:56:52 TL, 3:58:56 TL, 4:00:41 TL, 4:01:30 TL, 4:02:38 TL, 4:04:41 TL, 4:04:53 TL, 4:06:02 TL, 4:09:08 TL, 4:09:22 TL, 4:12:12 TL, 4:13:58 TL, 4:14:01 TL, 4:19:20 TL, 4:22:11 TL , 4:24:05 TL, 4:25:36 TL, 4:27:55, 4:28:58 TL, 4:34:27 TL)
TL = telephoto lens,代表配有望遠鏡頭的相機也同時觀測到的sprite事件。由於今晚的能見度非常好,所以我們決定把其中一台相機換上望遠鏡頭(300mm/f4.5),以觀測sprite的細微結構。配上望遠鏡頭的相機,其視野只有4度 x 3 度,所以視野由標準的50mm/f1.4鏡頭的20 x 15 視野銳減成 4 x 3。在三十三個事件中,同時能在配有望遠鏡頭的相機同時看到20個事件,運氣可以說是非常好(參見圖五)。
八月八日 (UT221)
觀測視野完全被雲層遮蔽。
八月九日 (UT222)
基特峰陰雨,無法觀測。UCB的Steve Mende博士和DMI的Torsten Neubert博士在今天加入Sprite99的觀測行列。
八月十日 (UT223)
天候絕佳,但完全沒有雷雨系統可觀測。
亞利桑那大學物理系謝克強教授在今天下午,組織了一個小型的研討會,題目是「Observation of Sprite from Space」,我們、UCB的Steve Mende和 DMI 的 Torsten Neubert分別給一個簡短的演講。我們介紹 FORMOSAT2的任務和「高空大氣閃電儀酬載計畫,Steve Mende介紹Sprite研究的現況和高空大氣閃電影像儀,而Torsten Neubert則介紹丹麥的第二小型衛星計畫 (dry weight ~ 80 kg),及四個進入最後決選階段的酬載計畫(http://dsri.dk/dssp/DSSP-beginning.html)。
Torsten Neubert從Los Alamos國家實驗室借來一部低光度的Xybion攝影機,據Steven Mende說這是其他從事sprite野地觀測研究群最常使用的系統。而這次Sprite99使用的攝影機是Steve Mende買組件來自行組合。比較兩者間的功效,我們發現Steve Mende的組裝系統在解析度和觀測景寬方面,都比Xybion攝影機好上不少。另外,Mende的系統使用標準的相機鏡頭,而Xybion系統則使用專利的鏡頭,所以將來鏡頭的取得只能購至Xybion公司。(http://www.xybion.com/xoshis.htm)
八月十一日 (UT224)
天候絕佳,但完全沒有雷雨系統可觀測。
八月十二日 (UT225, 13 sprites)
在東南方到南南東方觀測到13個sprite,Socorro基地也對同一雷雨系統作觀測,所以應有一些同步觀測事件。由於水平方向有薄雲,而且雷雨系統約在700公里外,所以sprite的結構並不很清晰。
觀測視野及宇宙時:
(144az, 8; 03:09:12, 03:09:49, 03:11:26 TL, 03:15:58, 03:17:20, 03:21:06 TL, 03:23:36 TL, 03:26:55, 03:29:01, 03:41:00 TL)
觀測視野及宇宙時:
(155az, 11; 04:11:30, 04:17:07)
觀測視野及宇宙時:
(166az, 7; 05:21:24)
八月十三日 (UT226)
基特峰陰雨,無法觀測。
八月十四日 (UT227)
基特峰陰雨,無法觀測。
八月十五日 (UT228)
回台灣,航程及候機共用了23小時。在洛杉磯,由美國國內線轉國際線,光是找國際線航站大廈就是個大工程。
觀測行感想
這是我們第一次參加sprite的野地觀測 (field observation),所以感觸實在是很特殊。地面觀測受天候的影響非常大,在我們這次三十一天的觀測中,只有八晚觀測到sprite事件。其餘的天數大多是因為觀測基地陰雨,而無法進行觀測,而有四天是因為天氣太好,沒有雷雨系統可供觀測。不過基本上每天平均花費7-8小時在觀測任務上,和所觀測到的sprite事件的總和時間約70秒比起來,兩者之間的差異實在非常懸殊。不過這可能是學術研究的共同特質吧,長時間的準備和觀測或測量,往往只能得到少量可用的數據。
在回台灣的前夕,收到日東東北大學地球物研究所Yukihiro Takahashi博士的電子郵件,他提到他們在科羅拉多州 Yucca Ridge基地的sprite野地觀測,從八月3日到12日間,都沒有看見任何sprite事件。相較之下,讓我們覺得好過多了。
以下為我們這次Sprite99野地觀測的一些結論和想法:
sprite的三角測量:
Sprite99野地觀測分別在七月二十七日、八月七日及八月十二日,取得兩個觀測基地同步觀測的數據,將可以對有同步觀測的sprite,獲得事件的精確位置。對能夠分辨細微結構的事件,應能進一步建構出這些sprite的立體結構。所以雖然受天候的影響,基特峰和Socorro兩處基地很難得有機會進行同步觀測,但八月七日的觀測,在數據量和品質方面,應對sprite的研究有相當的價值。
sprite的觀測的經驗:
在這次的觀測任務中,雖然大部份的觀測夜晚,還有一位丹麥的研究生在場,但是基於累積觀測經驗的考量,在三十個觀測夜晚的裡,有二十七晚的儀器架設、調整與及各項工作,都由我們親手操作。所以我們在這次野地觀測任務,從雲圖的判讀,到觀測雷雨系統的選取,都累積了許多的實際經驗。如果未來決定在台灣地區進行sprite的地面觀測,這次的觀測行的經驗,將可以使在台灣地區進行sprite觀測能順利成功的推行。
sprite的觀測儀器:
在這次觀測任務中,我們比較過三種低光度/夜視相機系統,它們分別是是CCD、CID和Xybion系統。CCD和CID系統是UCB的Steve Mende博士從組件組合而成,除了記錄影像的一個是用CCD科技,另一個是用CID科技外,兩者的架構完全相同,而兩者都是使用標準的相機鏡頭,所以鏡頭的更換和取得很方便。Xybion系統相較之下,視野較小而且解析度也差,鏡頭也是Xybion公司所開發的專利鏡頭。如果我們要在台灣從事sprite觀測,可能應優先考慮使用CID系統。雖然市面沒有商業的CID整合系統可購買,但是並不難從現有的組件,組成一套優良昀低光度攝影系統。
台灣未來的sprite地面觀測:
在這次的觀測行中,我們所觀測的sprite事件,並非全部來自中尺度以上的雷雨系統,有些小型的雷雨系統也會產生sprite,只是數量較少而已。所以我們預期侵襲台灣的颱風系統、梅雨峰面系統和北部冬季的雷雨系統,應該都會產生sprite。而中部的鹿林前山可能是可以考慮的觀測基地之一,因為鹿林前山是已建有中央大學的天文台,在後勤支援方面較為方便。尤其觀測所需要的衛星雲圖等氣象資訊,也較容易透過已經建有的網路取得。而且鹿林前山的標高有2600公尺,觀測上所受的阻礙也較少。不過這只是初步的構想,將來如果真得要在台灣地區作觀測,觀測基地可能還要進一步考查。
觀測設備:
Sprite99野地觀測所使用的設備非常簡單,主要的配備有兩部低光度攝影機 (命名為TOP相機和CID相機),一部宇宙時加印機,和兩部Hi-8規格的錄影機。低光度攝影機基本上是數位式攝影機,它的前端是標準相機鏡頭 (50mm/f1.4或300mm/f4.5),中間是增強影像的影像增強器 (image intensifier),接下來是把增強影像轉送給記錄器的光導管。TOP相機是採用固定式的光導管,而CID相機是用一個透鏡作為導光裝置。相機的最末端是影像記錄器,TOP相機是採用CCD科技,而CID相機是用CID (charge injection device) 科技。(參見圖六~八)
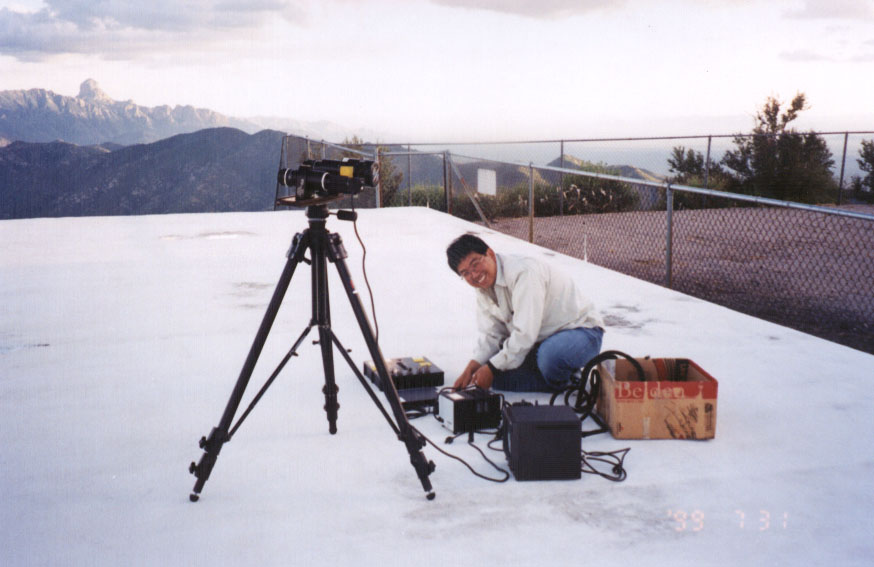
圖六、Sprite99野地觀測所使用的低光度攝影機及其週邊裝置。
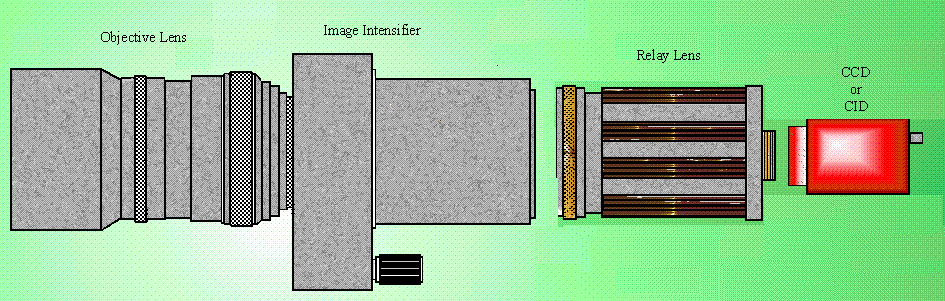
圖七、Sprite99野地觀測所使用的低光度攝影機的主要結構。

圖八、Sprite99野地觀測所使用的宇宙時加印機(圖左方)、Hi-8錄影機(圖右方)。
攜回資料:觀測數據錄影帶六捲。
影像札記
2003-02-11 高空大氣閃電影像儀(ISUAL)模擬 Sprite 拍攝
- Details
- Created on Monday, 13 December 2010 09:17
高空大氣閃電影像儀(ISUAL)
模擬 Sprite 拍攝
張名輝、黃天祥
成大高空大氣閃電影像儀科學團隊
國立成功大學物理系
在本文中﹐我們模擬福爾摩沙二號衛星上的科學酬載—高空大氣影像儀(ISUAL)拍攝到的 Sprite 的情形。
福爾摩沙二號衛星的軌道資料如下:
| Parameter | Mission Orbit |
| Altitude | 891 Km |
| Inclination | 98.99 deg |
| Mean Motion | 14 rev/ day |
| Revisit Cycle/ Repeat Cycle | 1 day |
圖中之紅色陰影區域為ISUAL的觀測區域,黃色線代表福爾摩沙二號衛星的運行軌道。 藍色矩形代表ISUAL的位置,藍色十字是模擬Sprite發生的中心位置,黑色陰影區域表示黑夜。
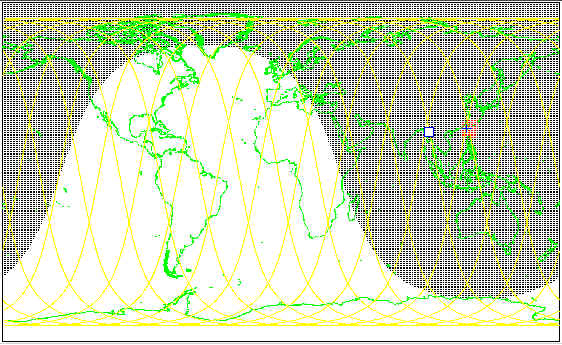
ISUAL自UT time 55820至56000的拍攝情形如下圖,其中模擬Sprite發生的中心位置是 經度120,緯度23,高度30至90公里,半徑15公里,白色區域為模擬雲,中心位置同Sprite,高度為10至15公里,半徑100公里。ISUAL的拍攝角度為61.4045。

1999-07-30 光學系統設計(Zemax初學手冊)
- Details
- Created on Monday, 13 December 2010 09:01
光學系統設計(Zemax初學手冊)
蔡長青
ISUAL 計畫團隊
focal length
國立成功大學物理系
(第一版,1999年7月29日)
內容綱目:
習作四:Schmidt-Cassegrain和aspheric corrector
習作五:multi-configuration laser beam expander
習作六:fold mirrors和coordinate breaks
習作七:使用Extra Date Editor, Optimization with Binary Surfaces
前言
整個福爾摩沙衛星二號「紅色精靈」科學酬載計畫,其量測儀器基本上是個光學儀器。所以光學系統的分析乃至於設計與測試是整個酬載發展重要一環。
這份初學手冊提供初學者使用軟體作光學系統設計練習,整個需要Zemax光學系統設計軟體。它基本上是Zemax使用手冊中tutorial的中文翻譯,由蔡長青同學完成,並在Zemax E. E. 7.0上測試過。由於蔡長青同學不在參與「紅色精靈」計畫,所以改由黃曉龍同學接手進行校稿與獨立檢驗,整個內容已在Zemax E. E. 8.0版上測試過。我們希望藉此初學手冊(共有七個習作)與後續更多的習作與文件,使團隊成員對光學系統設計有進一步的掌握。(陳志隆註)
習作一:單鏡片(Singlet)
你將學到:啟用Zemax,如何鍵入wavelength,lens data,產生ray fan,OPD,spot diagrams,定義thickness solve以及variables,執行簡單光學設計最佳化。
設想你要設計一個F/4單鏡片在光軸上使用,其focal length 為100mm,在可見光譜下,用BK7鏡片來作。
首先叫出ZEMAX的lens data editor(LDE),什麼是LDE呢?它是你要的工作場所,譬如你決定要用何種鏡片,幾個鏡片,鏡片的radius,thickness,大小,位置……等。
然後選取你要的光,在主選單system下,圈出wavelengths,依喜好鍵入你要的波長,同時可選用不同的波長等。現在在第一列鍵入0.486,以microns為單位,此為氫原子的F-line光譜。在第二、三列鍵入0.587及0.656,然後在primary wavelength上點在0.486的位置,primary wavelength主要是用來計算光學系統在近軸光學近似(paraxial optics,即first-order optics)下的幾個主要參數,如focal length,magnification,pupil sizes等。
再來我們要決定透鏡的孔徑有多大。既然指定要F/4的透鏡,所謂的F/#是什麼呢?F/#就是光由無限遠入射所形成的effective focal length F跟paraxial entrance pupil的直徑的比值。所以現在我們需要的aperture就是100/4=25(mm)。於是從system menu上選general data,在aper value上鍵入25,而aperture type被default為Entrance Pupil diameter。也就是說,entrance pupil的大小就是aperture的大小。
回到LDE,可以看到3個不同的surface,依序為OBJ,STO及IMA。OBJ就是發光物,即光源,STO即aperture stop的意思,STO不一定就是光照過來所遇到的第一個透鏡,你在設計一組光學系統時,STO可選在任一透鏡上,通常第一面鏡就是STO,若不是如此,則可在STO這一欄上按滑鼠,可前後加入你要的鏡片,於是STO就不是落在第一個透鏡上了。而IMA就是imagine plane,即成像平面。回到我們的singlet,我們需要4個面 (surface),於是在STO欄上,選取insert cifter,就在STO後面再插入一個鏡片,編號為2,通常OBJ為0,STO為1,而IMA為3。
再來如何輸入鏡片的材質為BK7。在STO列中的glass欄上,直接打上BK7即可。又孔徑的大小為25mm,則第一面鏡合理的thickness為4,也是直接鍵入。再來決定第1及第2面鏡的曲率半徑,在此分別選為100及-100,凡是圓心在鏡面之右邊為正值,反之為負值。而再令第2面鏡的thickness為100。
現在你的輸入資料已大致完畢。你怎麼檢驗你的設計是否達到要求呢?選analysis中的fans,其中的Ray Aberration,將會把transverse的ray aberration對pupil coordinate作圖。其中ray aberration是以chief ray為參考點計算的。縱軸為EY的,即是在Y方個的aberration,稱作tangential或者YZ plane。同理X方向的aberration稱為XZ plane或sagittal。
Zemax主要的目的,就是幫我們矯正defocus,用solves就可以解決這些問題。solves是一些函數,它的輸入變數為curvatures,thickness,glasses,semi-diameters,conics,以及相關的parameters等。parameters是用來描述或補足輸入變數solves的型式。如curvature的型式有chief ray angle,pick up,Marginal ray normal,chief ray normal,Aplanatic,Element power,concentric with surface等。而描述chief ray angle solves的parameter即為angle,而補足pick up solves的parameters為surface,scale factor兩項,所以parameters本身不是solves,要調整的變數才是solves的對象。
在surface 2欄中的thickness項上點兩下,把solve type從fixed變成Marginal Ray height,然後OK。這項調整會把在透鏡邊緣的光在光軸上的height為0,即paraxial focus。再次update ray fan,你可發現defocus已經不見了。但這是最佳化設計嗎?再次調整surface 1的radius項從fixed變成variable,依次把surface 2的radius,及放棄原先的surface 2中thickness的Marginal Ray height也變成variable。再來我們定義一個Merit function,什麼是Merit function呢?Merit function就是把你理想的光學要求規格定為一個標準(如此例中focal length為100mm),然後Zemax會連續調整你輸入solves中的各種variable, 把計算得的值與你訂的標準相減就是Merit function值,所以Merit function值愈小愈好,挑出最小值時即完成variable設定,理想的Merit function值為0。
現在談談如何設Merit function,Zemax 已經default 一個內建的merit function,它的功能是把RMS wavefront error 減至最低,所以先在editors中選Merit function,進入其中的Tools,再按Default Merit Function 鍵,再按ok,即我們選用default Merit function ,這還不夠,我們還要規定給merit function 一個focal length 為100的限制,因為若不給此限制則Zemax會發現focal length為![]() 時,wavefront aberration的效果會最好,當然就違反我們的設計要求。所以在Merit function editor第1列中往後插入一列,即顯示出第2列,代表surface 2,在此列中的type項上鍵入EFFL(effective focal length),同列中的target項鍵入100,weight項中定為1。跳出Merit
時,wavefront aberration的效果會最好,當然就違反我們的設計要求。所以在Merit function editor第1列中往後插入一列,即顯示出第2列,代表surface 2,在此列中的type項上鍵入EFFL(effective focal length),同列中的target項鍵入100,weight項中定為1。跳出Merit
function editor,在Tools中選optimization項,按Automatic鍵,完畢後跳出來,此時你已完成設計最佳化。重新檢驗ray fan,這時maximum aberration已降至200 microns。
其他檢驗optical performance還可以用Spot Diagrams及OPD等。從Analysis中選spot diagram中的standard,則該spot大約為400 microns上下左右交錯,與Airy diffraction disk比較而言,後者大約為6 microns交錯。
而OPD為optical path difference(跟chief ray作比較),亦從Analysis中挑選,從Fans中的Optical Path,發現其中的aberration大約為20 waves,大都focus,並且spherical,spherochromatism及axial color。 Zemax 另外提供一個決定first order chromatic abberation 的工具,即 the chromatic focal shift plot,這是把各種光波的back focal length跟在paraxial上用primary wavelength 計算出first order的focal length之間的差異對輸出光波的wavelength 作圖,圖中可指出各光波在paraxial focus上的variation。從Analysis中Miscellaneous項的Chromatic Focal Shift即可叫出。
●習作二:雙鏡片
你將學到:畫出layouts和field curvature plots,定義edge thickness solves, field angles等。
一個雙鏡片是由兩片玻璃組成,通常黏在一起,所以他們有相同的curvature。藉著不同玻璃的dispersion性質,the chromatic aberration可以矯正到first order所以剩下的chromatic aberration主要的貢獻為second order,於是我們可以期待在看chromatic focal shift plot圖時,應該呈現出parabolic curve的曲線而非一條直線,此乃second order effect的結果(當然其中variation的scale跟first order比起來必然小很多,應該下降一個order)。
跟習作一一樣,我們仍然要設計一個在光軸上成像,focal length為100mm的光學系統,只不過這次我們用兩塊玻璃來設計。
選用BK7和SF1兩種鏡片,wavelength和aperture如同習作一所設,既然是doublet,你只要在習作一的LDE上再加入一面鏡片即可。所以叫出習作一的LDE,在STO後再插入一個鏡片,標示為2,或者你也可以在STO前在插入一面鏡片標示為1,然後在該鏡片上的surface type上用滑鼠按一下,然後選擇Make Surface Stop,則此地一面鏡就變成STO的位置。在第一、第二面鏡片上的Glass項目鍵入BK7即SF1,因為在BK7和SF1之間並沒有空隙,所以此doublet為相黏的二鏡片,如果有空隙則需5面鏡因為在BK7和SF1間需插入另一鏡片,其glass type為air。現在把STO旱地二面鏡的thickness都fixed為3,僅第3面鏡的thickness為100且設為variable,既然要最佳化,還是要設merit function,注意此時EFFL需設在第三面鏡上,因為第3面鏡是光線在成像前穿過的最後一面鏡,又EFFL是以光學系統上的最後一塊鏡片上的principle plane的位置起算。其他的merit function設定就一切照舊。
既然我們只是依習作一上的設計規範,只不過再加一面SF1鏡片而已,所以其他的merit function設定就一切照舊。現在執行optimization,程序如同習作一,在optimization結束後,你再叫出Chromatic Focal Shift來看看,是否發現first order的chromatic aberration已經被reduced,剩下的是second order chromatic aberration在主宰,所以圖形呈現出來的是一個parabolic curve,而且現在shift的大小為74 microns,先前習作一為1540 microns。
再看其他的performance效果,叫出Ray aberration,此時maximum transverse ray aberration已由習作一的200 microns降至20 microns。而且3個不同波長通過原點的斜率大約一致,這告訴我們對每個wavelength的relative defocus為很小。再者,此斜率不為0(比較習作一Fig E1-2),這告訴我們什麼訊息呢?如果斜率為0,則在pupil coordinate原點附近作一些變動則並不產生aberration代表defocus並不嚴重,而aberration產生的主要因素為spherical aberration。故相對於習作一(比較他們座標的scale及通過原點的斜率),現在spherical aberration已較不嚴重(因為aberration scale已降很多),而允許一點點的defocus出現,而出現在rayfan curve的S形狀,是典型的spherical balanced by defocus的情況。現在我們已確定得到較好的performance,但實際上的光學系統長的什麼樣子呢?選擇Analysis,Layout,2D Layout,除了光學系統的擺設外,你還會看到3條分別通過entrance pupil的top,center,bottom在空間被trace出來,他們的波長是一樣的,就是你定的primary wavelength(在此為surface 1)。這是Zemax default的結果。
但是現在還有一個問題,我們憑直覺定出STO的thickness為3,但是真正在作鏡片的時候,STO和surface 2鏡面會不會互相交錯穿出,即在edge的thickness值為正數或負數,還有是不是應該改一下設計使lens的aperature比diameter小,如此我們可預留些邊緣空間來磨光或架鏡。
於是我們可能更改的是diameter,STO的thickness來解決上述問題。先在STO的diameter上鍵入14來蓋過12.5,此時會有一個”U”字出現代表user define,現在設想我們要edge thickness固定為3mm,可是你或許會問這樣系統豈不是弄亂了嗎?defocus又會出現,關鍵是再一次執行optimization即可。在STO的thickness上按一下,選擇Edge Thickness項目,則會出現”Thickness”及”Radial Height”兩項,設thickness為3及radial height為0(若radial height為0,則Zemax就使定user define的semi-thickness)按OK跳出,你會發現STO的thickness已改變,且會出現一個”E”字代表an active thickness solve在該項的parameter上。
既然edge thickness已改變,所以focal length也一定有些許變動,為了維持原有的EFFL,現在再執行optimization一次即可。現在我們想看看off-axis的performance,從system的Fields中的Field Data,選用3個field來作比較,怎麼選呢?在第2及第3個列中的”Use”項中各按一下,在第2列的y field行中鍵入7(即7 degree),在第3列中鍵入10,第一列則讓它為0即持續on-axis。而設所有的x field皆為0,對一個rotational對稱的系統而言,他們的值很小,按OK鍵跳出。現在Update rayfan,你可看到如Figure E2-4之圖。圖中T代表tangential,S為sagittal,結果顯示off-axis的performance很差,這是因為一開始我們就設計系統在on-axis上來作optimization,這些aberration可以用field
curvature plot來估計,選Analysis中,Miscellaneous的Field Curv/Dist。則出現如Figure E2-5的圖,左圖表示shift in paraxial focus為field angle的函數,而右圖為real ray的distortion,以paraxial ray為參考ray。在field curvature plot的訊息也可從rayfans中得知,為field curvature plot是正比於在rayfan plot中通過原點的斜率。
●習作三:牛頓望遠鏡
你將學到:使用mirrors,conic constants,coordinate breaks,three dimensional layouts,obscurations。
牛頓望遠鏡是最簡單的矯正所有on-axis aberrations的望眼鏡。牛頓望遠鏡是利用一個簡單的parabolic mirror完美地矯正所有order的spherical aberration,因為我們只在optical axis上使用,除spherical aberration外並沒有其他的aberration。
假想要設計一個1000mm F/5的望遠鏡,我們需要一個具有2000mm的curvature及200mm的aperture。在surface 1即STO上的curvature項中鍵入-2000 mm,負號表示對object而言,其曲面為concave,即曲面對發光源而言是內彎的。在thickness項中鍵入-1000,負路表示光線沒有透過mirror而是反射回來,在Glass項中鍵入MIRROR,最後在System的General項中的aperture中鍵入200。
Wavelength選用0.550,field angel則為0。現在看看spot diagram,你會看到一個77.6 microns RMS的spot diagram,而一個很方便估算image quality的方法就是在spot diagram的頂端上再superimpose一個Airy diffraction ring。從spot diagram的menu bar選擇Setting,在Show Scale上選”Airy Disk”,結果如圖Figure E3-1所示,你會發現和選”scale bar”的結果是一樣的。圖中所列的RMS spot size選”Airy Disk”為77.6 microns。光線並沒有diffraction-limited的原因是因為我們還沒有設定conic constant。先前我們設定的curvature的值為-2000只是定義一個球面,若要定義一個拋物面鏡,則在STO的Conic項中尚需鍵入-1,接下來Update spot diagram,你會看到”Airy ring”為一個黑圈,而光線則聚集在圈內中心上,RMS值為0。
可惜的是,成像的位置很不好,所謂的不好是它位於在入射光的路徑上,若你要看這個像的話,你的觀看位置剛好擋住入射光。改善的方法是在反射鏡的後面再放一個折鏡,fold mirror(後面是相對於成像點而言)。這個fold mirror相對於光軸的傾斜角度為45,把像往上提離光軸。因為進來的光束為200mm寬,因此成像平面至少在離光軸100mm的上方,如此”看”像的時候才不會擋住入射光。我們決定用200mm,而fold mirror離先前的反射鏡面為800mm,因為200+800=1000等於原先在STO上的thickness,即成像”距離”不變。操作如下,先把STO的thickness改為-800,然後在imagine plane前插入一個dummy surface,為何要插入dummy surface呢?又dummy surface是什麼呢?dummy surface的目的只是在幫助我們把fold mirror的位置標示出來,本身並不具真實的光學鏡片意義,也不參予光學系統的任何”反應”,所以稱為dummy surface。怎麼插入dummy surface呢?先在image plane前面插入一個surface,這個surface很快地就會被轉變成fold mirror,但是你不要自己在surface type處去改變它成為fold mirror,而是選Tools中的Add Fold Mirror,並在其”fold surface”處選”2”代表定義surface 2為fold mirror,完成後你將看到如Zemax P.31頁中LED的表。或許你會問,表中surface type處在surface 2及4中皆為Coord Break,這又是什麼?coordinate break surface是在目前的系統內定義一個新座標系統,它總是用dummy surface的觀念用來作ray tracing的目的。而在描述此新座標系統中,通常選用6個不同參數,即x-decenter,y-dencenter,tiltx,tilty,tiltz及一個flag來指示tilting或decentration的order。
要注意的是,coordinate break總是相對於”current”而”global”的coordinate system,即只是在一個系統內部,若要改變某樣物件的位置或方向,我們即利用coordinate break來作此物件的區域調整,而不用重新改變所有的系統各部份。Coordinate break就像是一個平面指向調整後的局部系統的方位。然而coordinate break surface絕不會顯示出來。而它的glass項中顯示為”-“代表不能鍵入,而它的surface
type型式一定跟它前一面鏡的glass type一致。現在我們來看看layout,不能選2D(2D只能看rotational symmetric systems),要用3D看,叫出layout後,按↑↓ 或page down or up可以看立體效果,這個設計尚可再作改善,首先入射光打到fold mirror背後的部份可以vignetted,這在實際的系統中是一個很重要的思量。在STO的前面插入一個surface,令這個surface的thickness為900,在surface type中的Aperture Type還為”Circular Obscuration”,在Max Radius鍵入40,因為fold mirror的semi-diameter為31,如此才能遮蔽。Update 3D layout,如看不到像Figure E3-3的圖,則在3D layout的setting項中改變the first surface和the last surface分別為1及6即可。
●習作四:Schmidt-Cassegrain和aspheric corrector
你將學到:使用polynomial aspheric surface, obscurations, apertures, solves, optimization, layouts, MTF plots.
本習作是完成Schmidt-Cassegrain及polynomial aspheric corrector plate。這個設計是要在可見光譜中使用。我們要一個10inches的aperture和10inches的back focus。開始設計之初,先把primary corrector System, General, 在aperture value中鍵入10,同在一個screen把unit” illimeters”改為”Inches”。再來把Wavelength設為3個,分別為0.486,0.587,0.656,0.587定為primary wavelength。你可以在wavelength的screen中按底部的”select”鍵,即可完成所有動作。目前我們將使用default的field angle value,其值為0。依序鍵入如Zemax P.33頁的starting
prescription for schmidt cassegrain的LDE表,此時the primary corrector為MIRROR球鏡片。你可以叫出2D layout,呈現出如Figure E4-1之圖。現在我們在加入第二個corrector,並且決定imagine plane的位置。鍵入如Zemax P.33 Intermediate prescription for schmide cassegram的LDE,注意到primary corrector的thickness變為-18,比原先的-30小,這是因為要放second corrector並考慮到其size大小的因素。在surface4的radius設定為variable,透過optimization, Zemax可以定下他的值。先看看他的layout,應如Figure E4-2所示。叫出merit function, reset後,改變”Rings” option到5。The rings option決定光線的sampling density, default value為3,在此設計,我們要求他為5。執行optimization, 用Automatic即可,你會發現merit function的值為1.3,不是很理想。這是residual RMS wave error所致。跳出merit function,從system中選Update
All,則secondary corrector的radius已變成41.83。從Analysis, fans,中選Optical Path, OPD plot如Figure E4-3所示,發現其為defocus且為spherical,大概約有4個wave aberration需要矯正。
現在切入另一個主題,利用指定polynomial aspheric cofficients來作aspheric correction。改變surface 1的surface type從standard改為”Even Asphere”,按OK後跳出,回到surface 1 列中,往右移直到4th Order Term, 把此項設為變數,依法炮製,6th, 8th,後再次執行optimization。把OPD plot update,其圖應如Figure E4-4所示,你會發現spherical aberration已被大大地減少。小心一點的觀察,不同的三個波長其相對的aberration有不同的spherical amount, 這就是spherichromatism,是下一個要矯正的目標。依據經驗所得,我們要用axial color來矯正spherochromatism,何謂axial color balance呢?而實際上spherochromatism是在first order axial color中被忽略的higher order效應。而現在first
order axial color並不存在,如果first order存在的話,代表其效應(首先axial color既是指軸而言,他即表示paraxial-optics,即不同color在軸上的效應,也就是first order optics)要遠大於higher order, 即higher order的aberration會被balance掉,即first order會搶higher order的aberration, 用first order axial color來消除higher order的spherochromatism這是在光學設計上常用的手法。
要怎麼引進axial color呢?我們改變surface1的curvature來達到axial color的效果。把曲面1的radius設為variable,執行optimization,再看看update後OPD plot圖,如圖E4-5所示,這就是我們所要設計的,殘餘的像差,residual aberration小於1/20波長,這個良好結果,可以讓我們些微改變field angle,從system, field中,把field angle的值設為3個,分別是0.0, 0.3, 0.5。現在field angle已改變,等於boundary condition已改變,所以你需要重定你的merit function。把merit function的”Rings”改變為”4”後跳出執行optimization, 則新的OPD plot應如圖E4-6所示,雖有不同的field angle,但是所有的aberrations卻可以接受。說明此設計還不錯。
假想我們要用此望遠鏡來照相,則這組望遠鏡的鑑別轉換功效為何?什麼是鑑別轉換功效(Modulation Transfer Function)呢?這就是說,若是發光物Object的鑑別率為M0,而經過此望遠鏡後所得到的鑑別率是Mi,則MTF=Mi/ M0即MTF愈大,代表此望遠鏡較不會降低原有的鑑別率,也就比較不會失真。而MTF的橫軸為spatial frequency in cycles per millimeter, spatial為鑑別尺(bar target)明暗條紋中其分隔空間寬度之意,通常以millimeter為單位,而frequency in cycles即每millimeter有幾組明暗條紋,所以可鑑別最小刻度,即反應該光波的頻率。Modulation Transfer Function,即呈現如圖E4-7所示之圖,而tangential & sagittal對各種入射光field angle的response也一併顯示。
對一個有經驗的設計者而言,此設計所呈現的MTF為circular pupil autocorrelation的結果。這是我們尚未考慮the secondary corrector所帶來遮蔽效應。既然secondary corrector放在primary的前面中心位置上,則入射光一定有部分被擋住,並且在primary上有個洞把成像的光放出去,此洞也需納入考量,所以我們高估了我們的performance。改良如下,回到LDE,在曲面3的第一項中點兩下,從Aperture types中選Circular Aperture,在Min Radius中鍵入1.7,即入射光離光軸的半徑需大於1.7才可進入,此動作再處理primary上的洞,同時把Max Radius改為6。再來處理secondary corrector的obscuration,在surface 3的前面,插入一個surface這個new surface就變成了surface 3,把其thickness改為20,且surface 2的thickness改為40,如此20+40=60並不改變光從BK7後到primary的長度。調整surface 3的Aperture type,設定為Circular Obscuration。把Max Radius訂為2.5,按OK後跳出,同時設定surface 3的semi-diameter也是2.5,update後的MTF,你會發現performance已降低,特別是在medial spatial frequencies部分。
●習作五:multi-configuration laser beam expander
你將學到:使用multi-configuration capability。
假設你需要設計一個在波長λ=1.053μ下操作的laser beam expander,Input diameter為100mm,而output diameter為20mm,且Input 和output皆為collimated。在此設計之前,我們必須遵守下列設計條件,
- 只能使用2個鏡片
- 本設計在形式上必須是Galilean(沒有internal focus)
- 只有一個aspheric surface可以使用
- 此光學系統必須在λ328μ下完成測試。
本設計任務不只是要矯正aberration而已,而是在兩個不同wavelengths的情況下都要做到。先談談條件2中什麼是Galilean呢?Galilean就是光線從入射到離開光學系統,在光學系統內部不能有focus現象,在本例中即beams在兩個鏡片之間不能有focus。好在本系統不是同時在2個wavelengths下操作,所以在操作時我們可以變動某些conjugates。現在開始設計,依據Zemax P.4-18頁的LDE表中鍵入各surface的相關值。其中surface 5的surface type從Standard改為Paraxial,這時在鏡片後面的focal length項才會出現。注意到使用paraxial lens的目的是把collimated light(平行光)給focus。同時把surface 5的thickness及focal length皆設為25,entrance pupil的diameter定為100,wavelength只選一個1.053 microns即可,記住不要在設第二個wavelength。叫出merit function,在第1列中把operand type改為REAY這表示real ray Y將用來作為一種constraint,在本設計中,我們被要求Input diameter為100而output diameter為20,其比值為100:20=5:1,即入射beam被壓縮了5倍,在srf#中鍵入5,表示在surface中我們要控制他的ray height,而Py上則鍵入1.00。把target value定為10,這個動作將會給我們一個diameter collimated為20mm的output beam。為什麼呢?因為Py是normalized的pupil coordinate,即入射光的semi-diameter為50。,Py=1即現在的入射光is aimed to the top of the entrance pupil,把target value定為10,就是輸出光的semi-diameter為10,所以50:10=5:1,光被壓縮了5倍,達到我們的要求。semi-diameter的值定為10,現在選Tools,Update,你會看到在value column上出現50的值,這就是entrance pupil radius即表示coordinates是座落在一個單位圓(unit circle)上,而其半徑為50,當Px=0,Py=1即表示在y軸的pupil大小為50,而在x軸的則為0。
從edit menu bar選Tools,Default Merit Function,按Reset後把”Start At” field的值改為2,這表示以後的operands會從第二列開始,而不會影響已建立的REAY operand。執行optimization後,把OPD plot叫出來,如圖E5-1所示,你會發現performance很差,大約為7個waves。
這個aberration主要來自spherical aberration,所以我們要把surface 1改為a spheric,把surface 1列中的conic設為variable,再次執行optimization,你會看到較好的OPD plot。現在把所有的variable都去掉,然後將此field存檔,因為你已完成wavelength在1.053μ下的beam
expander設計。但是wavelength在0.6328μ的情況怎麼辦呢?我們進入此習作的另一個主題,也就是multi-configuration可以在同一系統中同時設定不同的configuration,以適應不同的工作環境或要求,先前我們已完成了wavelength為1.053μ的configuration,把他看做configuration 1,而wavelength 0.6328為configuration 2。
把wavelength從1.053改為0.6328後看看OPD plot,出現非常差的performance,這是因為glass dispersion的緣故。我們調整lens spacing來消除此defocus把surface 2的thickness設為variable,執行optimization後,update OPD plot,此時的aberration大約為一個wave,接下來消掉surface 2 thickness的variable。現在我們來使用Zemax的multi-configuration capability功能,從main menu上選Editors,後Multi-configuration,再選其中的Edit,Insert Config,如此我們就可以加入一個新的configuration,在第一列的第一項中按兩下,選”wave”,同時在”Wavelength#”中選為1,這表示在不同的configuration,我們使用不同的wavelengths。在Config 1下鍵入1.053,Config 2下鍵入0.6328,在插入一個新的列於此列的第一項中按兩下,選THIC為一個operand type,這會讓我們在各別的configuration中定義不同的thickness,從”surface” list中選2後按OK。在Config 1下鍵入250,Config 2也鍵入250,不過在surface中選2即表示在LDE中surface 2的thickness是當作mult-configuration的一項oprand value,把Config 2下surface 2的thickness設為variable。回到merit function editor,選Tools,Default Merit Function,把”StartAt”的值改為1,使default merit function會從第一列開始考慮。現在先前設定的REAY constraint條件必須加到此新的multi-config merit function,在merit function的第一列中,有一個CONFoperand且在”Cfg#”項中定為1,表示現在configuration 1是avtive。在此列之下尚有三個OPDXoperands,於CONF和第一個OPDX之間插入一個新列,把其operand type改為”REAY”,”Srf#”鍵入5。表示我們要控制的ray height是對surface 5而言,Py鍵入1.00target value設為10。如同先前的file讓輸出beam的diameter為20mm。在CONF 1的要求接設定完畢,在CONF 2則不設任何operand,因為我們不可能在兩種wavelengths操作下要求exact 5:1的beam。回到LED,把surface 1,2,4的curvatures及surface 1的conic皆設為variable,執行optimization(現在有5個variable為active,3個curvatures,1個conic,1個multi-config thickness)。叫出update的OPD plot,你可以在mulit-configuration editor上在”Config 1”或”Config 2”上按兩下,則OPD plot會顯示其對應的configuration,或者你可用Ctrl-A的hot key,在不同的configuration間作變換,你會發現兩者的performance都很好,表示我們所設計的系統在wavelength 1.053或0.6328μ的laser之下皆可以工作。
●習作六:fold mirrors和coordinate breaks
你將學到:瞭解coordinate breaks, sign conventions在調整傾斜度,或改變系統中心的作用和如何裝置fold mirrors等,本習作的大部分技巧在”Add Fold Mirror”工具中可自動執行,然而瞭解實際的操作內容和細節,才是本習作的目的。
在習作3時或許你已學會如何設計Newtonian望遠鏡,其中已經有coordinate breaks的操作,以及光在經過mirror反射後thickness虛設定為負值,和coordinate breaks需伴隨著一對使用,而把要的fold mirror如三明治般地夾在其中。本習作將教你如何在一個簡單的converging beam中manually加入fold mirrors,而不使用Tools中的”Add Fold Mirror”功能。
叫出LDE,把STO的surface type改為paraxial,thickness定為100,這時對paraxial lens的default focal length值,然後從System, General,中把aperture設為20,即產生一個F/5的lens。完畢後看看3D layout,一個簡單的paraxial lens所造成converging beam的光學系統已完成。假設我們要把輸出的convergingbeam導向上,怎麼作呢?那就是加入一個fold mirror,先假定此fold mirror為45°oriented且具paraxial lens為30mm。總共需要3個鏡片。一個為coordinate break把coordinate system轉45°,然後一個mirror來反射光線,最後再一個coordinate break把反射後的beam給轉45°這是很重要的一點,共要3個surface來裝置一個fold mirror。coordinate breaks本身沒什麼作用,只是把入射光和輸出光作同樣的傾斜或改變中心座標的動作而已。在imaging surface前面出入3個lens,把surface 1的thickness定為30,在surface 3的glass fold mirror尚未titled,所以系統會在paraxial lens的左邊40mm處focus。更改surface 2及4的surface type為Coordinate Brek,回到LDE往右一,在surface 4的第3個parameter column中期heading上頭標示為”Title About X”。在此項中按兩下,選”Pick Up”,且設定”From Surface”為2,”Scale Factor”為1.0,這代表surface 4的coordinate break動作會跟surface 2的一樣。移由標到surface 2的”title about x”項中,鍵入45,Update layout你會看到如Figure E6-1的圖。注意到coordinate break的thickness為0,表示mirror和coordinate break surface是重合的。應該注意的是,mirror本身並沒有轉,轉的是入射前合入射後的座標系統,在反射後除了轉45°外,並且移了-70units去focus,所有的tilt或decenter動作總是在光線跑,即thickness之前完成。現在再裝第二個fold mirror,同樣在imagine surface前面插入3個surface,把surface 4的thickness從-70改為-30,在surface 5的tilt about x項鍵入-45,目的是在把光的進行方向還原到平行於原始入射方向,而surface 7的tilt about x項一樣選擇pick up from surface 5且scale factor定為1。
Update 3D layout,則呈現如Figure E6-2的圖,如我們期待的,+45和-45互相抵消,輸出光平行於入射光,又要改變兩組的coordinate breaks的參數,只要改變surface 2及5即可。因為surface 4及7會各別依隨他們變動而變動。
●習作七:使用Extra Date Editor, Optimization with Binary Surfaces
或許你不會相信,會有”achromatic singlet”這樣的東西。當然,mirror是一個achromatic singlet,姑且不論之,去設計一個矯正到first-order chromatic aberration混合refractive/diffractive成分是可能的。其中的技巧就是使用一個傳統refrative singlet,然後將其中的一面蝕刻成一個diffractive surface。此singlet造成很大的focusing power,而the weak diffractive component則提供足夠的dispersion來補償glass的dispersion。讓我們來回顧一些概念,一個focal length f的singlet其optical power為φ=f-1,在λF-λC的波長範圍下,power的變異部分可由singlet其glass的Abbe number V來描述,其中λF及λC為hydrogen的F及C
line的wavelength依序為0.4861μm和0.6563μm。故
Δφ=φ/V
在大部分的glasses種類中,他們的dispersion都很小,如BK7來說,其V值為64.2。而Δφ大約為整體的2%。
而Diffractive optics則直接使用phase of wavefront操作來增加光數的optical power。對一個具有quadratic phase profile的diffractive
surface,其phase為
ψ=Ar2
A為每平方單位長度的弧度量,而r為radial coordinate。如此的diffrective surface,他的power為
φ=λA/π
和他所承受的波長呈線性相關。在同樣的波長範圍下,refractive singlet的power變異為2%,而diffractive optic power則幾乎為40%,此外,dispersion的正負號可由A的正負號來決定。這有什麼好處呢?如果我們在refractive部分增加一些positive power,同時可由在diffractive部分增加一些negative power來達到補償的效果。所增的power量可以從”Standard”改為”Binary 2”。然後在IMA前面加入一個新的surface,即插入surface 2,其thickness設為100。STO的thickness設為10,glass選為BK7,從System, General中Aperture Value定為20。Wavelengths選0.486,0.587及0.656,選0.587定為primary。首先我們看一個convex-plano singlet的performance,把surface 1的radius設為variable,且從Merit Function Editor的tools中使用Default Merit Function。子行Optimization,叫出OPD plot,你會發現其aberration約為8個waves。除了axial
color主宰此設計外,spherical aberrotion和default也相當可觀。
現在改良此設計,從Editors,Extra Data中在”Max Term”項上鍵入1和”Norm Aper”上鍵入10,而”Coeff on PΛ2”此項則設為變數。然後執行Optimization,其中有兩項變數,分別是surface 1的radius及diffractive power。Update OPD plot則maximum aberration已經降至約一個wave,造成aberration的主要原因只剩下secondary spectrum及spherical aberration。我們利用higher order term的技巧來矯正他,回到Extra Date Editor,把”MaxTerm #”改為2,且社fourth order term項為variable,再次執行optimization。叫出updated後的OPD plot,你會發現wavefront aberration已大大降至1個wave以下。